Les autres méthodes
de positionnement :
Il existe d'autres
méthodes de positionnement, utilisant le système GPS. Nous allons
en étudier quelques unes.
Le GPS différentiel
:
Le GPS différentiel
( DGPS ) fonctionne exactement comme le système décrit précédemment,
mais offre des performances nettement supérieures. Le changement s'effectue
au niveau du récepteur, qui est équipé d'un boîtier
supplémentaire permettant de reçevoir des informations, ou plutôt
des corrections en provenance de stations DGPS. En effet, le GPS offre des performances
moyennes à cause de la disponibilité sélective (S-A), et
dans certaine conditions, la précision peut être réduite
à des niveaux inférieurs à ceux d'autres systèmes
de radio-navigation à infrastructure terrestre, d'où l'interêt
du mode différentiel. Le principe du DGPS est relativement simple ; les
mesures effectuées en un lieu de position connue sont comparées
aux valeurs théoriques, c'est à dire cartographiques, leur différence
fournit alors une correction qui est retransmise vers l'utilisateur, dont le
récepteur integrera les corrections dans le calcul de sa position, améliorant
considérablement sa précision.
L'application de
cette méthode peut se faire à différents niveaux, soit
sur la position calculée, soit directement sur la mesure des pseudo-distances.
Un récepteur GPS est placé en un lieu de position connue : la
station de référence. Ce récepteur reçoit les signaux
émis par les satellites et mesure les pseudo-distances. Il les compare
ensuite avec les distances théoriques, c'est à dire les distances
entre le récepteur et chacun des satellites servant à la mesure
de positionnement. La position exacte des satellites est connue grâce
à des éphémérides que le récepteur charge
en mémoire. Les corrections sont ensuite élaborées et retransmises
vers l'utilisateur, via un message connu sous le nom de RTCM SC 104. Le récepteur
mobile peut donc appliquer les corrections à ses propres mesures de pseudo-distances.
Le DGPS est surtout utilisé à proximité des côtes,
et les messages de correction y sont retransmis par les radiophares maritimes
sur la bande 285-325 KHz.
La technologie DGPS
augmente considérablement la précision la faisant passer de 30
m à moins d'un mètre 50 cm. L'inconvénient d'un tel système
est sa portée, qui n'exède pas plusieurs centaines de kilomètres
autour des stations d'émmission. Cependant la couverture peut être
nettement améliorée grâce à la retransmission des
corrections par l'intermédiare de satellites géostationnaires
( WADGPS *
). La couverture est alors étendue à 2000 km, mais les satellites
relais sont encore trés peu nombreux.
La mesure de phase*
:
1. Principe général
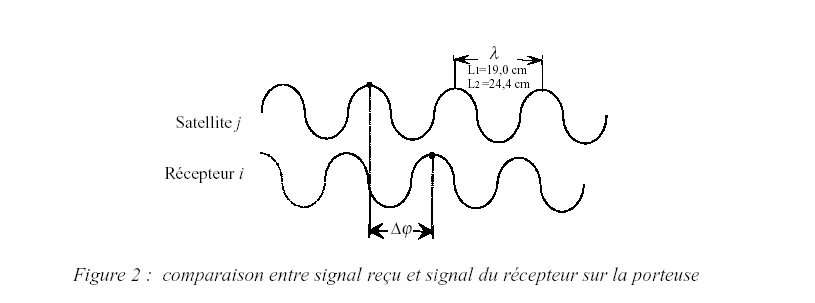
Les récepteurs
les plus perfectionnés permettent d'exploiter directement la phase sur
les ondes porteuses L1 et L2 en déterminant le déphasage entre
le satellite et le récepteur. Le principe de ce système est la
comparaison de la phase du signal reçu par le récepteur ( donc
émis par le satellite ) avec la phase du signal généré
par l'oscillateur à quartz interne au récepteur et qui est une
réplique du signal satellite. A partir de cette mesure de phase, on peut
obtenir une distance en multipliant par la longueur des ondes porteuses qui
est connue : 19,0 cm pour l'onde L1 et 24,4 cm pour l'onde L2. La distance obtenue
est la distance satellite-récepteur. Ce mode de mesure est plus compliqué
à mettre en œuvre que celui basé sur le code et c'est pourquoi
il requiert des récepteurs spécifiques permettant d'exploiter,
en plus du code, la phase.
Le traitement des données peut se faire de deux façons : soit
en mode post - opératoire à l'aide logiciels spécialisés
; soit en temps réel, au quel cas on parle alors de RTK ( Real Time Kinematic
).
2. Principe physique
En comparant la
phase du signal à l'instant de réception ( tR ), à la phase
du signal à l'instant d'émission ( tE ), on obtient une différence
dØ ( qui est en fait un décalage car l'onde du récepteur
est identique à celle du satellite ) qui symbolise le retard de l'onde
durant la distance satellite-récepteur avec
delta Ø = Øi(tR) - Øj(tE)
Les Ø représentent les phases du signal du satellite ou du récepteur
à un instant t donné. De plus, pour plus de clarté dans
ce développement, on apporte l'indice i aux données concernant
le récepteur et l'indice j aux données concernant le satellite.
D'autre part, on
a la relation générale : Ø(tR) - Ø(tE) = f (tR -
tE) (1)
où f est la fréquence de l'onde.
D'après la relation v = d / t , on a : t = d / v.
Soit ici comme t = (tR - tE) et v = c où c est la célérité
de la lumière dans le vide de 3*10^8 m.s-1
Donc on obtient (tR - tE) = Dij / c où Dij est la distance entre le récepteur
i et le satellite j.
En remplaçant dans l'équation (1), on a alors : Ø(tR) -
Ø(tE) = Ø(Dij) / c (1')
Lorsque le récepteur compare la phase Øi(tR) de son signal à
la phase Øj(tE) du signal qu'il obtient à tR, il obtient un déphasage
dØ, compris entre 0 et 1 cycle de phase, c'est-à-dire la partie
décimale de la différence Øi(tR) - Øj(tE).
On obtient en fait Øi(tR) - Øj(tE) = dØ(tR) + Nij(tR) (2)
où Nij est un nombre entier inconnu de cycles que le récepteur
ne peut pas mesurer. C'est-ce qu'on appelle l'ambiguïté initiale.
Ainsi, la première
mesure de phase ne détermine en fait que la partie fractionnaire. Ceci
est la conséquence du fait que tous les cycles de l'onde porteuse sont
absolument identiques, et qu'il est impossible d'identifier un cycle par rapport
à un autre.
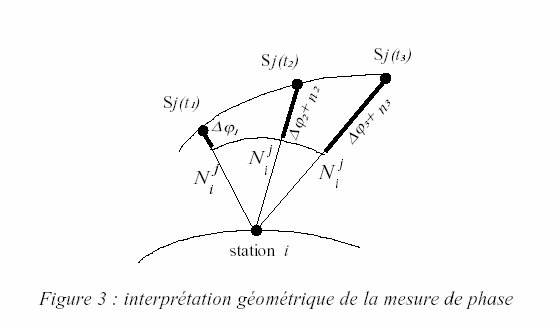
Mais en plus du déphasage dØ, le récepteur mesure à
l'aide d'un compteur le nombre entier de cycles du déphasage reçus
depuis la première mesure. Ainsi si t1 est l'instant de la première
mesure, pour toutes les autres mesures, on aura, tant que la réception
du signal n'est pas interrompue :
Nij(tR) = Nij(t1) + n(tR) où n(tR) est le nombre de cycles comptés
par le compteur à l'instant (tR).
On obtient donc en remplaçant dans l'équation (2)
:
Øi(tR) - Øj(tE) = dØ(tR) + Nij(t1) + n(tR)
Soit : dØ(tR) = Øi(tR) - Øj(tE) - (Nij(t1) + n(tR))
Par conséquent, pour un satellite donné, la quantité inconnue
Nij(t1), qui est le nombre de cycles avant le début du comptage du récepteur,
est la même pour toutes les mesures tant qu'il n'y a pas d'interruption
du signal. Cette quantité Nij(t1), est appelé ambiguïté
entière. On la notera simplement Nij par la suite.
La mesure de phase
s'écrit donc :
dØ(tR) + n(tR) = Øi(tR) - Øj(tE) - Nij (3)
De plus, d'après
l'équation (1'), on a : Øj(tE) =Øj(tR) - f (Di j) / c
En remplaçant dans (3), on obtient :
dØ(tR) + n(tR) =Øi(tR) - Øj(tR) + f (Di j) / c - Nij
On remarque alors que Øi(tR) - Øj(tR) devrait s'annuler et simplifier
cette dernière formule, car le signal délivré par l'oscillateur
interne au récepteur est une réplique du signal satellite, soit
les ondes du satellite et du récepteur sont identiques, donc les phases
des ondes satellite et récepteur devraient être identiques à
tout instant t et on devrait avoir : Øi(t) = Øj(t).
Mais cela serait vrai seulement dans un cas fictif, idéal, où
les deux horloges seraient parfaitement synchronisées. En réalité
il y a un décalage des horloges par rapport au temps GPS. Par conséquent
Fi(tR) - Øj(tR) n'est pas tout à fait égal à 0.
Ainsi, si Dti et Dtj sont les décalages par rapport au temps GPS (tR),
on admettra ici la relation : Øi(tRi) - Øj(tRj) = f (Dtj - Dti)
On peut alors exprimer la mesure de phase en distance en multipliant par la
longueur d'onde lambda :
si Ø = dØ(tR) + n(tR)
Ø = f(dtj-dti) + (f*dij)/c - Nij
et d'après la relation sur les ondes c = lambda x f pour les simplifications
:
delta Ø = c(dtj-dti) + dij - delta Nij
Mais cette expression
n'est pas utilisée ainsi, directement dans les programmes de calculs.
En effet la méthode du G.P.S par mesure de phase ne s'utilise que pour
le positionnement relatif, ce qui nécéssite pour la mesure une
station de référence en plus du récepteur mobile.
De plus on remarque que l'ambiguïté entière est conservée
jusque dans l'expression finale et donc qu'il faudra au récepteur la
résoudre via des algorithmes qu'il a en mémoire.
D'autre part, une interruption du signal provoque un saut de cycle, c'est-à-dire
une autre valeur pour l'ambiguïté qui se traduit par des mesures
aberrantes à partir d'un instant donné, qui correspond au saut
de cycle, mais qu'on ne connaît pas. La contrainte de ce système
par mesure de phase est donc que la liaison satellite-récepteur doit
être permanente tout au long de la mesure. De plus un tels système
et trés coûteux car il nécéssite un récépteur
d'une grande technologie, et la mesure n'est pas instantannée. Ce sont
les principales raisons pour lesquelles cette métohde sert principalement
aux groupes de scientifiques, avec comme essentielle utilisation, la surveillance
de l'évolution des plaques tectoniques ou encore des mesures d'altitude,
et d'autres applications ayant attrait à la géologie.
Mesure de phase
et fiabilité :
1. Le positionnement
relatif par mesures de phase
Avec le positionnement
relatif *,
on détermine les coordonnées d'un point inconnu (k), à
partir des coordonnées d'un point (i) connu à partir de mesures
de phases aux deux points i et k, simultanément sur les mêmes satellites.
On a vu précédemment que l'expression de la mesure de phase à
la station sur le satellite j est : Mesure de phase et fiabilité :
Ø = f (Dtj-Dti)
+ ( f x Dij ) / c - Nij
Il existe différents modes de positionnement relatif appliqués
à la mesure de phase mais tous sont régis par le même principe
de différences afin d'éliminer les erreurs potentielles ; cependant
certains sont plus poussés que d'autres dans cette optique et permettent
donc d'obtenir des résultats meilleurs.
2.1 La simple différence :
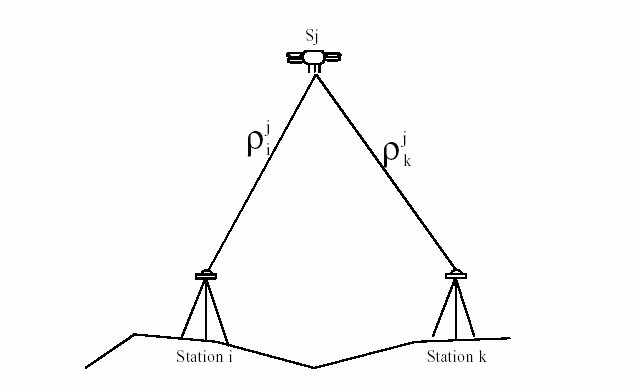
Les stations i et k ( en fait, on a une station fixe au sol, par exemple i,
que nécessite le positionnement relatif, et le récepteur mobile,
par exemple k) observent le même satellite j au même instant, et
on forme la simple différence : Øjik = Øjk - Øji
Soit :Øjik = f(Dti - Dtk) + f(Dkj - Dij)/c - (Nik - Nij)
Le décalage des horloges satellites n'intervient alors plus. C'est l'intérêt
de ce principe de mesure. Cependant les horloges des satellites sont des horloges
atomiques précises à 10^(-13) secondes près et dont la
déviation est régulièrement vérifiée par
les stations de contrôle. La déviation qui peut s'opérer
par rapport au temps GPS est donc infime. Il serait mieux de parvenir à
éliminer le décalage des horloges récepteurs dont le risque
de déviation est supérieur.
2.2 La double différence :
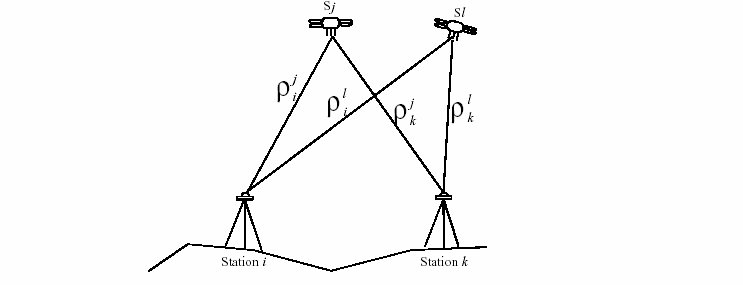
Les deux stations i et k observent les deux satellites j et l simultanément,
et on forme la double différence :
Øjl (ik)
= Øl (ik) - Øj (ik)
Ce qui donne en remplaçant par l'expression précédente
:
Øjl (ik) = f(Dlk - Djk + Dij-Dil) /c - (Nlk - Njk + Nij -Nil)
Ainsi par cette méthode de double différence, le décalage
des horloges des récepteurs est alors éliminé. Cependant,
le défaut de cette méthode est que, tout comme la précédente,
elle conserve les ambiguités entières de la mesure de phase et
s'expose donc ainsi aux sauts de cycle.
2.3 La triple différence :

Les stations i et k observent toujours simultanément les satellites j
et l, mais en plus, on considère ici les mesures à deux époques
tm et tn. On forme alors la triple différence :
Øjl (ik) (nm) = Øl (ik) (n) - Øj (ik) (m)
Øjl (ik) (nm) = f (Dlk(n)
- Djk(n) + Dij(n) - Dil(n) - Dlk(m) + Djk(m) - Dij(m) +Dil(m) )
/c
On remarque que, en plus des décalages des horloges satellites et récepteurs,
les ambiguités entières sont toute éliminées car
l'ambiguîté entière est constante dans le temps tant qu'il
n'y a pas d'interruption du signal. En introduisant des variations au cours
du temps on peut ainsi l'éliminer. La triple différences est d'ailleurs
un moyen de détection des sauts de cycle.
3. Combinaisons
de phases et utilisation de la bi-fréquence
Avec des mesures bi-fréquence,
c'est à dire en utilisant à la fois les ondes L1 et L2 émises
par les satellites, on peut utiliser des combinaisons de phase. Les combinaisons
dite " ionosphere-free " et " wide lane " sont les plus
répandues .
La combinaison " ionosphere-free " est dite L3 et permet d'éliminer
l'erreur ionosphèrique. ( voir partie III )
La combinaison " wide-line " est dite L5 et permet de résoudre
plus vite les ambiguïtés.

( lien vers la partie III : la fiabilité
du GPS )